| description | title | keywords | image | slug | last_update | |||||
|---|---|---|---|---|---|---|---|---|---|---|
Motion Recognition based on Edge Impulse |
基于 Edge Impulse 的运动识别 |
|
/cn/XIAOEI |
|

欢迎使用此快速入门 wiki,了解如何将 Edge Impulse 与 Seeed Studio XIAO nRF52840 Sense 配合使用!在本指南中,我们将探讨如何使用板载 IMU 传感器来检测人体运动并对不同的动作进行分类。无论您是经验丰富的开发人员还是新手,本教程都将为您提供在 XIAO nRF52840 Sense 板上开始使用 Edge Impulse 所需的知识和技能。所以,让我们开始吧!
<iframe width={560} height={315} src="https://www.youtube.com/embed/hLKKorpDlYw" title="YouTube 视频播放器" frameBorder={0} allow="加速度计;自动播放;剪贴板写入;加密媒体;陀螺仪;画中画" allowFullScreen />在本 wiki 中,我们将向您展示如何利用 Seeed Studio XIAO nRF52840 Sense 上的加速度计与 Edge Impulse 相结合来实现运动识别。最新版本的 Seeed nRF52 板支持我们在这里提供的代码。
对于嵌入式 AI 应用,我们强烈建议使用“支持 Seeed nrf52 mbed 的电路板库”。
在这个wiki中,我们需要准备以下材料:
- Seeed Studio XIAO nRF52840 Sense
- 锂聚合物电池 (702025)
- Grove - OLED Display 0.66"
- Dupont 电缆或 Grove 电缆
- 3D打印外壳
- 导光塑料纤维

Hardware Set up
- 步骤 1. 用烙铁取下 Grove - OLED 显示屏 0.66“ 上的 Grove 底座
- 步骤 2. 使用剪线钳将杜邦电缆加工成约 3 厘米的长度,并在两端露出约 2 毫米的内部电缆
- 步骤 3. 将光纤穿过前面的小孔,并将末端放在 LED 上
- 步骤 4. Solder Seeed Studio XIAO nRF52840 Sense 与其他元素如下图所示:


:::注意 如果使用热熔胶加固焊缝会更好。 :::
-
步骤 5. 组装所有组件:
- 将光纤穿过外壳前部的小孔
- 将屏幕安装到固定位置
- 将电池夹在 Seeed Studio XIAO nRF52840 和屏幕之间
- 小心处理电线
- 将导光塑料纤维的一端放在 Seeed Studio XIAO nRF52840 的 RGB 灯下,剪掉多余的
- 组装箱子

组装一个:

下面列出了所需的库。强烈建议使用此处的代码来检查硬件是否运行良好。如果您在安装库时遇到问题,请参阅 此处.
要在Edge Impulse中设置Seeed Studio XIAO nRF52840 Sense,您需要安装以下软件:
- Node.js v12或更高版本。
- Arduino CLI
- Edge Impulse CLI 和串行监视器。通过打开命令提示符或终端进行安装,然后运行:
npm install -g edge-impulse-cli :::注意 安装 CLI 时有问题?请查看 安装和故障排除 以获取更多参考。 :::
所有软件都到位后,是时候将开发板连接到 Edge Impulse 了。
- 步骤 1. 通过 USB Type-C 数据线将 Seeed Studio XIAO nRF52840 Sense 连接到您的计算机。

- 步骤 2. 在Edge Impulse中创建新项目。

- 步骤 3. 选择“Accelerometer data”,然后单击“Let's get started!”

:::注意 在此步骤中,我们将尝试从 Seeed Studio XIAO nRF52840 Sense 板载 IMU 收集“加速度计数据”以构建数据集,然后使用 EdgeImpulse 平台训练模型。 :::
- 步骤 4. 将 "Accelerometer Raw Data" 草图上传到 Seeed Studio XIAO nRF52840 Sense。
将 Seeed_Arduino_LSM6DS3 Library下载 为 zip 文件
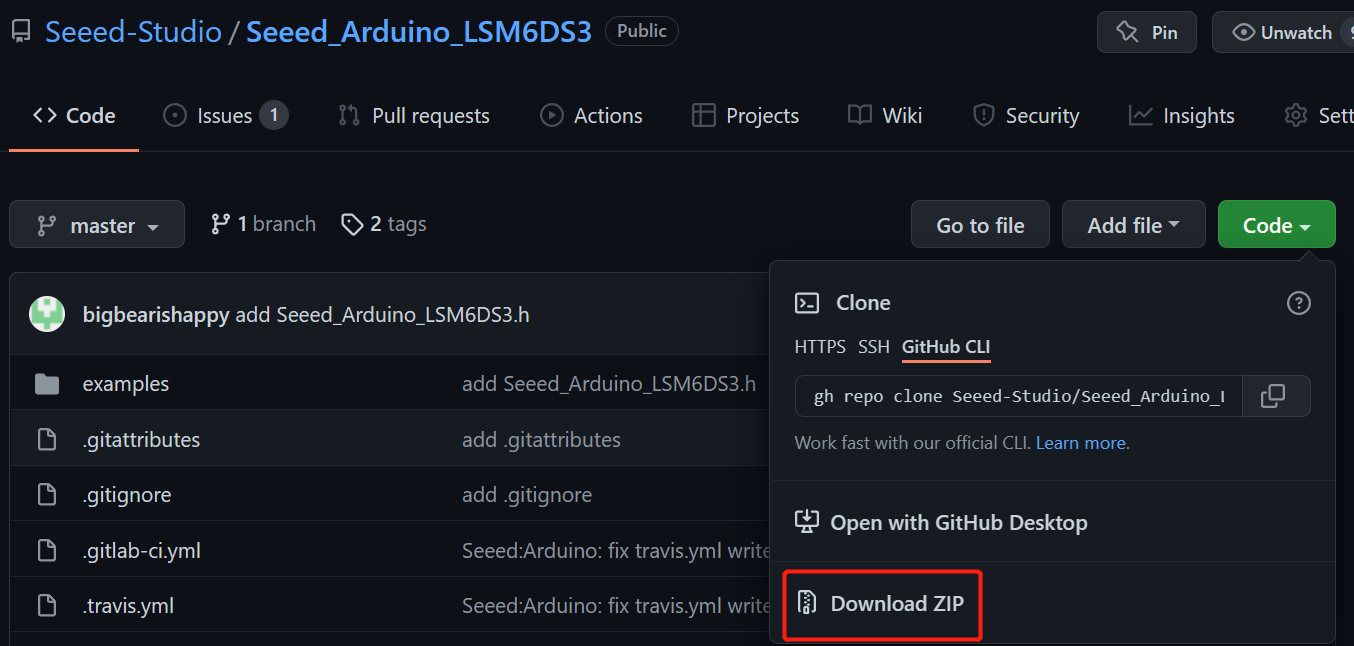
打开 Arduino IDE, 导航到 Sketch > Include Library > Add .ZIP Library... 并打开下载的zip文件。

上传以下代码并打开 串行监视器
// XIAO BLE Sense LSM6DS3 Accelerometer Raw Data
#include "LSM6DS3.h"
#include "Wire.h"
//Create a instance of class LSM6DS3
LSM6DS3 myIMU(I2C_MODE, 0x6A); //I2C device address 0x6A
#define CONVERT_G_TO_MS2 9.80665f
#define FREQUENCY_HZ 50
#define INTERVAL_MS (1000 / (FREQUENCY_HZ + 1))
static unsigned long last_interval_ms = 0;
void setup() {
Serial.begin(115200);
while (!Serial)
;
if (myIMU.begin() != 0) {
Serial.println("Device error");
} else {
Serial.println("Device OK!");
}
}
void loop() {
if (millis() > last_interval_ms + INTERVAL_MS) {
last_interval_ms = millis();
Serial.print(myIMU.readFloatAccelX() * CONVERT_G_TO_MS2, 4);
Serial.print('\t');
Serial.print(myIMU.readFloatAccelY() * CONVERT_G_TO_MS2, 4);
Serial.print('\t');
Serial.println(myIMU.readFloatAccelZ() * CONVERT_G_TO_MS2, 4);
}
}
现在,您将看到加速度计和陀螺仪数据在串行监视器上一个接一个地显示,如下所示!

- 步骤 5. 在
terminal或者cmd或者powershell中运行命令来打开它。
edge-impulse-data-forwarder
- 步骤 6. 我们需要使用 CLI 将 Seeed Studio XIAO nRF52840 Sense 与 Edge Impulse 连接。首先,登录您的帐户并选择您的项目

为加速度计和设备命名。

- 步骤 7. 将 XIAO nRF52840 Sense 连接到 Edge Inpulse
移动到 Edge Impulse 的“数据采集”页面,如果连接成功,结果应该是这样的。您可以在页面右侧找到“Seeed Studio XIAO nRF52840 Sense”的设备。
- 步骤 8. 选择传感器为"3 axes"。将标注命名为
up和down, 将采样长度(毫秒)修改为 20000,然后单击开始采样。

- 步骤 9. 上下摆动 Seeed Studio XIAO nRF52840 Sense 并保持运动 20 秒。您可以发现收购显示如下:

- 步骤 10. 通过单击右上角的原始数据来拆分数据,然后选择"Split Sample",单击“+Add Segment”,然后单击该图表。重复 20 次以上以添加段。 单击"Split" ,您将看到每个示例数据 1 秒钟。

- 步骤 11. 重复 步骤 8. 和 步骤 9. 并用不同的名称标记数据以单击不同的运动数据,例如
left和right,clockwise,anticlockwise等。 提供的示例是对上下、左和右以及圆圈进行分类。您可以根据需要在此处更改它。

:::注意 在步骤 9 拆分时间为 1 秒,这意味着您在步骤 8 中至少在一秒钟内进行一次上下摆动。否则,结果将不准确。同时,您可以根据自己的运动速度调整分割时间。 :::
- 步骤 12. 重新平衡数据集,单击Dashboard 并下拉页面以找到Perform train / test split
单击 Perform train / test split 然后选择 Yes 并确认

- 步骤 13. 创建 Impulse
单击 Create impulse -> 添加处理块 -> 选择 Spectral Analysis -> 添加学习块 -> 选择 Classification (Keras) -> 保存 Impulse

- 步骤 14. 光谱特征
单击并设置

单击 Spectral features -> 下拉页面单击保存参数 -> 单击 Generate features

输出页面应如下所示:

- 步骤 15. 训练模型
单击 NN Classifier -> 单击 Start training -> 选择 Unoptimized (float32)

:::注意 训练模型的精度对最终结果非常重要。如果您的输出训练结果低至 65% 以下,我们强烈建议您进行更多次训练。 :::
- 步骤 16. 模型测试
单击 Model testing -> 单击 Classify all

:::注意 注意 如果准确率较低,可以通过增加训练集和延长采样时间来检查数据集 :::
- 步骤 17. 构建 Arduino 库 单击 Deployment -> 单击 Arduino 库 -> 单击 Build -> 下载ZIP文件

- 步骤 18. .ZIP文件的名称非常重要,默认情况下,它被设置为Edge Impulse项目的名称。就像这里的名字是“XIAO-BLE-gestures_inferencing”。选择文件作为“将”.ZIP 文件“添加到您的 Arduino 库


- 步骤 19. 在 [此处]下载代码(https://files.seeedstudio.com/wiki/XIAO-BLE-Motion-Recognition/XIAOEI.ino)。将头文件的名称更改为您自己的名称并上传。

- 步骤 20. 移动或按住 Seeed Studio XIAO nRF52840 Sense 移动或按住:
单击 Arduino右上角的显示器 。

当您向向左 和 向右 移动Seeed Studio XIAO nRF52840 Sensedirection时:
显示器将输出如下内容:

输出显示如下:

当你 上下移动Seeed Studio XIAO nRF52840 Sense时:
显示器将输出如下内容:

输出显示如下:

当您在空闲状态下 握住 Seeed Studio XIAO nRF52840 Sense 时:
显示器将输出如下内容:

输出显示如下

{kind=link}
祝贺!你痛苦地结束了项目。鼓励您可以尝试更多方向并检查哪一个将执行最佳输出。
.
感谢您选择我们的产品!我们在这里为您提供不同的支持,以确保您对我们产品的体验尽可能顺畅。我们提供多种沟通渠道,以满足不同的偏好和需求。